
Abstract
For decades, the field of robotics has progressed slowly in attempts to develop a robotic hand as dexterous as the human hand. However, recent research efforts are entertaining the idea that the key to creating a dexterous robotic hand may be in artificially re-creating the muscle- and tendon-based approach that controls the human hand. There are a host of challenges in replicating the human hand in robotics, many of which are due to a lack of knowledge of how human arm muscles are controlled by the brain. But recent research is broadening our understanding of the mechanics behind the dexterity of human hands, leading us towards a future where we can apply this information to the creation of complex robotic hands.
Introduction
It’s 7:00 AM, and Jane rolls over in bed to snooze the alarm on her phone. The 7:00 AM wake-up time has always been challenging, so to make things easier, Jane has developed into a self-proclaimed coffee snob. Each morning, she hand-counts 50 coffee beans for the perfect cup, carefully picking and placing each coffee bean into her coffee machine. But today, in a tragic twist of fate, Jane picks out the 48th, and last, coffee bean. Not keen on having her morning routine sabotaged twice in a row, Jane grabs a pen to quickly jot down a grocery list on a piece of paper, and then heads off to work. On a normal day at the office, she is frequently tapping away at a computer keyboard, averaging a typing speed of 70 words per minute. To settle down after a long day at work, Jane practices piano for an hour each night.
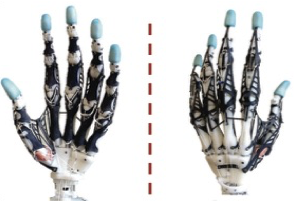
Throughout an entire day, Jane is able to successfully accomplish a wide range of tasks by utilizing an incredibly versatile pair of tools: her hands. Like most of us, Jane can live her life without having the slightest idea of how her hands actually work. In fact, what she takes for granted is an incredibly complex system, operated seamlessly by her brain and central nervous system. But not everyone is taking this for granted: Scientists and engineers have spent decades trying to understand how exactly the human hands work, and have attempted to create technology capable of replicating them. As a result, many different types of robotic “hands” have been created. Early iterations were often simple robotic claws, as seen in Figure 1. Figure 2 is an example of recent robotic hand models that have been developed to look like their human counterparts. But while each of these unique robotic hand models may be quite good at simple tasks, no one has developed the holy grail of robotic hand design: one that can perfectly replicate a human hand’s versatile capabilities. Robotic claws can pick up and move coffee beans, but there is not a pair of robotic hands that can play Beethoven’s Moonlight Sonata on the piano. More recent research initiatives at the intersection of physiology, neuroscience, computer science, and biomechanical engineering are looking to change this.


Re-Thinking Robotic Hand Design
Generally speaking, a common design model for robotic arms and hands has been based on what is known as a torque-driven approach. A torque-driven robotic hand has a motor at each individual finger joint, rotating sections of the finger independently [1]. This design intuitively makes sense: Controlling each individual joint in the hand would presumably allow you to achieve great accuracy in controlling the hand’s overall movement. However, this is unfortunately not the case – although the mathematics of torque-driven robotics is well understood, such robotic systems have never achieved the dexterity found in a human hand. Because of this inconvenience, researchers have had to consider a fundamentally new way of thinking about robotic hand designs. Human hands are controlled by muscle tendons that move finger bones, and this tendon-based design allows them to do a wide range of interesting tasks [1]. So, why not develop biologically-inspired tendon-driven robotic hands that work the same way? Such robotic hand designs that mimic those of human hands are known as anthropomorphic. In pursuit of creating anthropomorphic robotic hands, researchers have had to re-evaluate the shortcomings of torque-driven hand designs, analyze the fine details of how a biological hand operates, and engineer new tendon-driven designs that make use of their findings.
Anatomy and Mechanics of a Human Hand
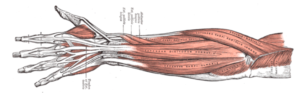
In order to achieve a basic understanding of how the human hand works, one can focus on the control of an individual finger. As Figure 3 shows, each finger has several tendons attached to it, where these tendons wind along the finger bones in intricate paths, and ultimately connect to one or more muscles. These muscles are in turn controlled by electrical impulses that originate at the brain and reach the muscles by traveling through the body’s central nervous system [2]. Consider the index finger, whose tendons are controlled by seven muscles. In order to tap the index finger on a computer keyboard, the brain sends each of the seven muscles a signal to contract or relax in such a way that moves the index finger to a desired position [1]. Such behavior is similar to a puppeteer controlling seven strings of a puppet. This anatomical arrangement, where muscles and tendon move bones, is known as a musculoskeletal system, and is the mechanism by which humans and other vertebrae move their bodies [1]. Robotics engineers use these fundamental concepts to develop new anthropomorphic robotic hands.
The Complexity of Replicating Human Limbs: Muscle Redundancy
These general mechanical principles of tendon-driven systems may be well-understood, but there is a host of challenges associated with implementing such systems in robotic form. Chief among these challenges is understanding a puzzling reality of musculoskeletal systems often referred to as “muscle redundancy” [3]. The paradox of muscle redundancy is essentially the fact that humans have many more muscles than would seemingly be necessary to adequately move their limbs. Some muscles appear to be redundant because they attach to similar, or even the same tendons on a limb as other muscles. This phenomenon is counter-intuitive because it is energetically expensive for the body to develop and maintain muscle mass, so it does not make sense that the human body would waste this energy on maintaining redundant muscles. Indeed, for almost half a century, the perplexing notion of muscle redundancy has often been called “the central problem of motor control” [3].
While neuroscientists and biomechanics researchers have grappled with the problem of muscle redundancy for decades, roboticists have mostly been off on their own, struggling to build dexterous torque-driven robotic hands. However, there has been a recent and potentially powerful realization that so-called “muscle redundancy” may be a key factor that makes tendon-driven human hands superior to torque-driven ones. The idea goes like this: some groups of human muscles may appear to be redundant, but they just might be differentiated enough to enable dexterous motion and functionality in human limbs [3]. If true, this idea could leverage the fields of neuroscience, biomechanics, and physiology towards engineering a truly dexterous anthropomorphic robotic hands.
Science and Engineering Collaborate to Understand Hand Dexterity
Creating anthropomorphic robotic hands clearly requires a blend of science and engineering. As we have seen, concepts from physiology, neuroscience, and biomechanics are important in helping biomechanical engineers and roboticists learn how to build dexterous robotic hands. In fact, Professor Emanuel Todorov and Dr. Zhe Xu at the University of Washington have taken some of these concepts and applied them in building an impressively versatile tendon-driven robotic hand, visualized in Figure 5 [4]. This tendon-driven robotic hand mimics the shape of a special glove worn by a human operator, and is capable of holding many types of objects including a pen, wallet, ball, and keys [5]. It is important to note that while the robotic hand is tendon-driven, its artificial tendons are not controlled by the large number of muscles like a human hand. To be sure, their robotic hand is certainly impressive, but it is questionable that it could mimic the full dexterity of a human hand without accurately replicating the arrangement of many muscles found in the human arm.

Conclusion
As we develop a more accurate understanding of how the human hand works and how to utilize this knowledge for creating dexterous robotic hands, the potential future applications become incredibly exciting. On the science side, learning exactly how a human’s arm muscles work when moving the hand could lead to improved surgical methods to repair and even replace damaged muscles. On the engineering side, one could imagine a pair of dexterous robotic hands being sent up to Mars, and being remotely controlled by humans on earth. These examples only scrape the surface of what might be possible and reveal just how impactful this technology could be on the course of humanity. But in the meantime, as brilliant minds work towards this future, we can at least appreciate that the most interesting engineering developments of the times will increasingly be the results of interdisciplinary inquiry and exploration.
References
| [1] | F. Valero-Cuevas, Foundations of Neuromechanics, vol. 8, London: Springer, 2015. |
| [2] | Pro Health, “Muscles and Fascia of the Forearm,” 2016. [Online]. Available: https://prohealthsys.com/anatomy/grays-anatomy/index-7/index-7-5/musclesforearm/. [Accessed 9 2016]. |
| [3] | B. C. H. Y. E. L. F.J. Valero-Cuevas, “Exploring the high-dimensional structure of muscle redundancy via subject-specific and generic musculoskeletal models,” Journal of Biomechanics, vol. 48, no. 11, p. 2887–2896, 2015. |
| [4] | E. T. Zhe Xu, “Design of a Highly Biomimetic Anthropomorphic Robotic Hand towards Artificial Limb Regeneration,” University of Washington, Seattle, 2016. |
| [5] | E. T. Zhe Xu, “The Highly Biomimetic Anthropomorphic Robotic Hand,” 8 2 2016. [Online]. Available: https://vimeo.com/154571244. [Accessed 9 2016]. |
| [6] | J. J. V.-C. F. J. Kutch, “Challenges and new approaches to proving the existence of muscle synergies of neural origin,” PLoS Computational Biology, vol. 8, no. 5, 2012. |
| [7] | O. B. F. V.-C. M. Santello, “Transferring synergies from neuroscience to robotics $ Comment on “Hand synergies: Integration of robotics and neuroscience for understanding the control of biological and artificial hands”,” Physics of Life Reviews, Berlin, 2016. |
| [8] | Thumbs Up, “Build Your Own Robot – Robot Arm,” 2016. [Online]. Available: http://www.thumbsupuk.com/Products/Build_Your_Own_-_Robot_Arm. [Accessed 9 2016]. |
| [9] | Shadow Robot Company, “Shadow Dexterous Hand,” 2016. [Online]. Available: https://www.shadowrobot.com/products/dexterous-hand/. [Accessed 9 2016]. |


