
Introduction

Helicopters have been able to fill the niche of full-sized, manned vehicles. Now, a new type of Micro Air Vehicle (MAV) is emerging as the small-scale equivalent of the full-sized helicopter. This new craft (see Fig. 1) is commonly referred to as a quadrotor. While the quadrotor is also rotor-based, it has a few key differences that set it apart from traditional helicopters and make it particularly attractive as an MAV. A four-rotor design allows quadrotors to be relatively simple in design yet highly reliable and maneuverable. Cutting-edge research is continuing to increase the viability of quadrotors by making advances in multi-craft communication, environment exploration, and maneuverability. If all of these developing qualities can be combined together, quadrotors would be capable of advanced autonomous missions that are currently not possible with any other vehicle.
What is a Quadrotor?
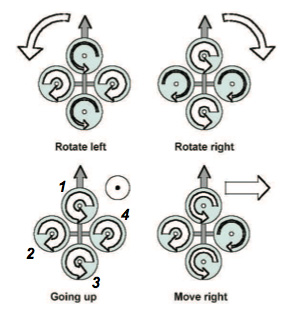
Such a machine has a few additional benefits over traditional helicopters. With a traditional helicopter design, a large primary rotor is used to generate lift, and changes in thrust are generally achieved by varying the pitch of the rotor blades because changing the speed of one large rotor requires too much time. Furthermore, the mechanical parts needed to adjust the pitch of the fast-spinning blade are complex and difficult to maintain. Quadrotors, however, can achieve thrust changes by varying the speed of each of the smaller and lighter rotors, allowing the complicated variable pitch components to be avoided. In addition, because of the single primary rotor, a traditional helicopter must have a tail rotor to counteract the torque created by the primary rotor. Quadrotors, on the other hand, do not need a tail rotor, since the counter-rotating rotors cancel out each other’s torques. These differences reduce quadrotors to a vastly simpler design that is cheaper to build and easier to maintain.
Development Timeline
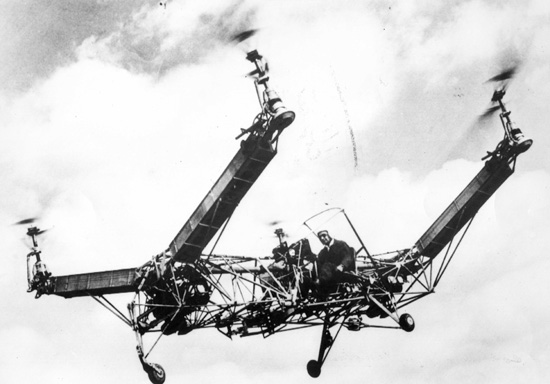
It was not until 1956 that the next major quadrotor was developed (see Fig. 3). Convertawing’s Model ‘A’ quadrotor eliminated the extra four rotors used in the Oehmichen No. 2 and featured wings for additional lift in forward flight. The craft was powered by two engines and was controlled by varying the power to each engine [3]. Although this craft flew many successful flights while in development, the project was scrapped due to lack of interest from the commercial and military sectors. Even though the project was scrapped, Convertawing’s contributions live on, as this novel control scheme is now the primary control scheme for current quadrotors. From this point on, future quadrotor development and most rotorcraft research focused on improving the single primary rotor design until the technological advancements that allowed development of small-scale quadrotors came about.
Current Applications

The largest use of quadrotors has been in the field of aerial imagery. Traditionally, stationary aerial imagery was only possible with full-sized helicopters. Quadrotor UAVs are a perfect replacement for this job because of their autonomous nature and huge cost savings. Capturing aerial imagery with a quadrotor is as simple as programming GPS coordinates and hitting the go button. The company called DraganFlyer currently sells video-capable quadrotors and various camera payloads for their X4 quadrotor. A picture of one of the configurations is shown in Fig. 4. The available payloads include a standard Panasonic digital still camera that is capable of 720p video, a video-only camera with Digital Video Recorder (DVR), a black-and-white low light video camera with DVR, and thermal infrared video camera with DVR. All of these video cameras have the option of being streamed live to the ground. With such diverse camera packages available, the X4 can be used in a number of different scenarios. These applications include everything from real estate photography to industrial systems inspection to military tactical surveillance. One company, Microdrones GmbH, is already seeing an increased use in its quadrotor as a surveillance tool. The German-made Microdrones are currently used in Germany, Belgium, and Norway, and pilot programs in England have been using these quadrotors since 2007 [5]. The Liverpool police use the Microdrone md4-200 quadrotor as an evidence-gathering tool and a fire brigade in West Midlands has also purchased an md4-200 for assistance during emergency situations. Both of these organizations are taking advantage of the quadrotor’s closed-circuit television capabilities and ability to provide an eye in the sky to the action below. The deputy chief fire officer of the West Midlands fire brigade says:
“This is fantastic new technology that will provide real benefits when we are tackling a range of emergency situations. Being able to look down on the scene will allow us to get a full picture of the incident and the surrounding environment, which will aid incident commanders to make vital, potentially life-saving decisions.PA News
With quadrotors continuing to gain acceptance as aerial imaging tools, the way has been paved for the introduction of new quadrotor applications.
Promising Research and Future Applications

Many new quadrotor applications will result from improvements in quadrotor collaboration. The MIT SWARM Health Management program introduces multi-quadrotor surveillance missions. One such mission has multiple quadrotors tracking and following moving ground targets. The health management feature of the missions allows quadrotors with low battery power or a critical failure to be automatically replaced with new quadrotors. In the case that a quadrotor’s battery is low, the quadrotor can land in a recharging station and then substitute for another quadrotor (“UAV SWARM Health Management Project”). Fig. 5 shows a snapshot of a SWARM demonstration. Such an effective health management system allows for continuous mission operation. The major limitation of this system stems from the need for a sophisticated high-speed camera system to communicate the positions of the currently operational quadrotors to each other. Newer projects can better estimate a quadrotor’s location and orientation with enhanced sensors and localization algorithms.

With all of these technologies on the horizon, a variety of new applications will appear. Aerial imaging capabilities will increase with the ability for multiple quadrotors to interact together in the same space. Quadrotors could be used to scan out a large area in synchronization, or image one area for a longer period of time with a health management policy. New venues, like sporting arenas, might also be able to take advantage of more robust aerial imaging. As the technology matures, Americans might also begin to see quadrotors in their hometowns, as is already possible in Europe. The police and military can implement these technologies in advanced tracking and surveillance scenarios. Imagine a quadrotor being used to chase a suspected criminal through dense city streets and into buildings, all without any prior knowledge of the environment. No existing machines can accomplish such a task. As research continues to push the boundaries of quadrotor capabilities, these and many more applications will unfold.
Conclusion
References
-
- [1] S. Bouabdallah et al. “Design and Control of an Indoor Micro Quadrotor,” in Proc. IEEE International Conference on Robotics and Automation, 2004, pp. 4393-4398.
- [2] W. Johnson. Helicopter Theory. New York: Dover Publications, 1994, pp. 13.
- [3] A. DiCesare et al. “Design Optimization of a Quad-Rotor Capable of Autonomous Flight.” Rep. Worcester Polytechnic Institue.
- [4] G. M. Hoffmann et al. “Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment,” 2007, pp. 2-3.
- [5] I. Thomson. “Police Camera Drone Takes to the Skies.” CRN. Internet: http://www.channelweb.co.uk/vnunet/news/2190448/police-camera-drone-takes-skies, May 22, 2007 [June 30, 2010].
- [6] D. Mellinger. “Quadrotor.” Internet: http://fling.seas.upenn.edu/~dmel/wiki/index.php?n=Main.Quadrotor, June 11, 2010 [June 30, 2010].
- [7] International Aerial Robotics Competition. “IARC 5th Mission.” Internet: http://iarc.angel-strike.com/oldauvs/5th_mission/index.php, July 21, 2009 [July 01, 2010].
- [8] PA Channel 4 News. “Fire Brigade’s ‘Eye in the Sky'” Internet: http://www.channel4.com/news/articles/science_technology/fire brigades eye in the sky/593352#fold, July 9, 2007 [June 30, 2010].
- [9] Aerospace Controls Laboratory at MIT. “UAV SWARM Health Management Project.” Internet: http://vertol.mit.edu/index.html, Mar. 2008 [July 01, 2010].

