The strength of famous superheroes may at last be within our grasp, as engineers develop powered exoskeletons to augment the abilities of the human body with mechanical force. Combining the principles of hydraulic pressure and computer simulation, these suits allow the wearer to complete feats of strength previously confined to comic books and the silver screen. As they continue to develop, more possible applications are emerging; the power and versatility of exoskeletons may eventually be limited only by our imagination.
Introduction
From Superman to Hercules, Gilgamesh to Sampson, humankind’s greatest fictional heroes share one common trait: strength eclipsing that of any real human being. We have always been fascinated by the possibility of transcending the limitations inherent in the human form, and while anabolic steroids and other chemical compounds have allowed us to push those limits to the extreme, there remains a definite cap on the ultimate power of the muscles and skeleton.
Taking cues from science fiction and popular films like Iron Man, engineers are currently working to surpass the body’s limitations by fusing it with mechanical systems. Powered exoskeletons could represent the next phase in human innovation, and with enough time and development, their strength could exceed all but the wildest imaginations (see Fig. 1).
Powered Exoskeletons Explained
In order to truly grasp the possibilities inherent in the application of a powered exoskeleton, one must first achieve a basic understanding of its design and implementation. At its core, a powered exoskeleton is a mechanical amplifier, a frame with joints corresponding to those on the human body, worn directly by the user and controlled via user movements [1]. The HAL-5 exoskeleton is an example of such a device. Rather than having a human operator control the system remotely, this particular technology integrates the operator into the system. Human beings possess naturally developed, instinctual methods for executing complex tasks like locomotion and object manipulation; machines provide the brute force, greatly increasing the comparatively small forces exerted by the operator’s muscles [1].
Mechanical exoskeletons also greatly reduce fatigue. Organic muscles will weaken upon continuous use, including the static support of weight; the hydraulic actuators of an exoskeleton reinforce and support the human frame so effectively that weights can be supported for extended periods of time with little or no pain in the user’s muscles [2]. Imagine not only hefting a 300 pound barbell, but keeping it aloft with enough ease that you might simultaneously walk around, eat, or even read a book. Feats like these might very well become commonplace in a world supported by powered exoskeletons.
While the basic principles of a system like this are relatively simple, the implementation is quite difficult and complex. The actual mechanics of its operation employ the same basic technologies that allows a mechanic to heft a several-ton automobile into the air with the touch of a button. The complexity lies in the control of the completed system, which proved so difficult that scientists were unable to even start working on one for decades [2].
Mechanical Muscles
Nearly every powered exoskeleton prototype in existence utilizes the same base technology – hydraulic actuators – to achieve high levels of strength. As the muscles of machines, the operation of hydraulic actuators is elegant in its simplicity.
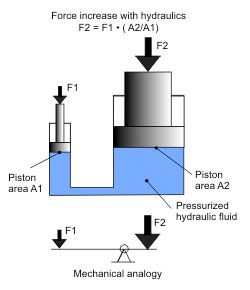
A hydraulic system is essentially a lever that works in any direction (see Fig. 2). It achieves the same effect of force multiplication as a lever, but it transfers the force using a pressurized fluid rather than a straight beam. The system works because of the definition of pressure, which is force over area. The fluid transfers the pressure more-or-less equally to all contact surfaces, but all contact surfaces are not created equal.
In order to operate a simple hydraulic system, the user must depress a piston with a relatively small cross-sectional area. The force will translate into an increase in pressure within the fluid, and that pressure will be exerted against a second piston of greater cross-sectional area. Because pressure is constant throughout, the second piston must experience an outward force equal to the initial user-supplied force multiplied by the ratio of the two cross-sectional areas. This basic principle is what allows the exoskeleton to increase a user’s strength so drastically.
Most of the hydraulic actuators are more complex than the aforementioned simple system with a wide variety of designs being investigated for use with powered exoskeletons. There are even prototypes currently under development that combine basic hydraulic actuators with torsion springs in order to more closely mimic the operation of the human muscle [3]. However, even with additions or modifications, all of the hydraulic actuators used in exoskeletons operate on the same basic principle of force multiplication.
Digital Synapses
The most complex part of an exoskeleton, and the most significant barrier to actual implementation, is the control interface. The primary reason this field of research was not pursued until only recently is that computers were not fast or powerful enough to predict and communicate the movements of the user to the hydraulic actuators. Thanks in large part to the staggering power of modern computers, this stumbling block has become a surmountable challenge rather than an impassable barrier.
As previously stated, the actual control system for a powered exoskeleton is the user. The human brain and muscles are what generate the signals driving the apparatus, but the control interface is what allows the frame of the exoskeleton to interpret and mimic the movements of the user in real time. The entire process hinges on a technology known as the “myoprocessor.” A myoprocessor is essentially a series of computer-generated models that simulate human muscles in real time in order to accurately predict the torque at each joint. These predictions are then fed into the basic operating system of the exoskeleton, which multiplies the force from the human by a predetermined factor, resulting in amazing feats of strength and dexterity [4].
The chief difficulties in the creation of myoprocessors are the tradeoffs inherent in speed and complexity. In order to be effective, the exoskeleton must be able to move in tandem with the user. Any delay essentially negates the advantages afforded by the human operator’s reflexes and natural movements. At the same time, the myoprocessor must have sufficient complexity to make accurate predictions; with increased complexity comes a decrease in speed. The bulk of research in this field has been to find a balance between these two factors. However, the interface between man and machine in an exoskeleton is becoming more and more seamless as computing power increases.
Applications
There are a number of different powered exoskeletons in development around the world, each with different goals and applications.
Without a doubt, the most complete system is Cyberdyne’s HAL-5, available for consumer purchase this year. Designed and built in Japan, HAL-5 is intended to allow an aging population to continue working and moving later in life. Its myoprocessors directly read the electromyogram (or EMG) signals traveling along muscle fibers, allowing for exceedingly smooth interaction between the user and the frame [2].
Simultaneously, the XOS and BLEEX suits are being developed in the United States, the former by Sarcos Labs and the latter by the University of California, Berkeley (see Fig. 3). Both are funded by DARPA and are aimed at increasing the mobility and load-bearing abilities of America’s soldiers [5]. The longer development time is partly due to a greater necessity for flexibility and response time, as soldiers would still be expected to crawl, run, and jump with these powered suits.
Besides providing tactical military advantages, there are many other possible applications of this technology. Firefighters might be able to more effectively remove people from burning buildings. Construction crews, moving services, and other manual labor-intensive jobs would become exponentially easier and safer.
Perhaps the most noble and inspiring use of these systems would not be to give average humans superior abilities, but to restore injured persons to their former selves. Robotically assisted therapy has been shown to be significantly less stressful for recuperating patients. Sufficiently advanced interfaces might even allow those with paralyses or muscular disorders to regain some, if not all, of their mobility [3]. These exoskeletons have the potential to change the world forever, and it is only a matter of time before they do so.
Difficulties
Despite the many advantages of exoskeletons, they are still not commercially available because of the many difficulties associated with their implementation. We have already discussed the obstacle of properly integrating the human signal to the mechanical motion, but a bigger obstacle lies in securing the required amount of power required for system operation. The pressures and forces generated by these suits require substantial amounts of power, and engineers are still working on developing a sufficiently portable power source. The BLEEX runs on an internal combustion engine, while the XOS remains hardwired to an external power supply [2]. The HAL-5, while battery powered, is limited to a mere 2.5 hours of operation from a full charge [2]. Much like the myriad issues facing the United States today, the difficulties associated with powered exoskeletons all come down to energy.
Conclusion
The powered exoskeleton represents a truly synergistic relationship between man and machine by combining the efficiency and adaptability of the human mind and body with the strength and speed of a machine. Coupling simple mechanical processes with sophisticated computer interfaces allows for a seamless integration of man and machine, so that any Average Joe can turn into Iron Man. With limitless applications and the glamor of real-life super power, powered exoskeletons are an example of human beings shaping their own future evolution. Additionally, it is possible that the recent surge in energy research will lead to a more viable power source for these suits. If this breakthrough can be made, the strength of legendary heroes will be at our fingertips, and the world will never be the same.